ربات ها می توانند در ماموریت هایی نظیر جستجو و نجات ، نظارت بر محیط زیست یا ارزیابی خسارات ناشی از بلایای طبیعی به انسان ها کمک کنند. طی چند سال گذشته ، ثابت شده است که سیستم های چند رباته برای حل مشکلاتی که شامل توزیع در فضا یا زمان است بسیار مفید هست. در ادامه با نبض دیجیتال همراه باشید.
محققان آزمایشگاه GRASP دانشگاه پنسیلوانیا اخیراً چارچوبی را ایجاد کردند که به تیم هایی از ربات ها اجازه می دهند تا فرآیندهای محیطی را با گذشت زمان مدلسازی کنند. در این چارچوب با استفاده از سیستم های چند روباتی، امکان پیش بینی تکامل پدیده های پیچیده ، پویا و غیرخطی مانند آتش سوزی در جنگل ها ، آلودگی حشرات یا پراکندگی آلاینده ها را فراهم کند.
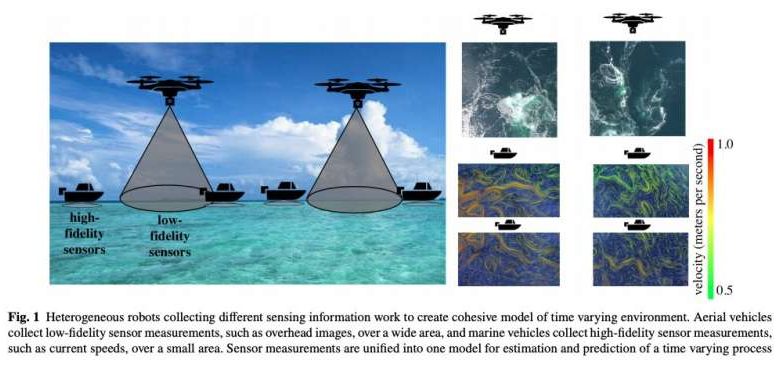
چارچوب توسعه یافته توسط محققان مستلزم استفاده از دو تیم ربات با الگوهای مختلف حرکت و قابلیت سنجش هستند. از آنجا که برخی از فرآیندهای محیطی می توانند پیچیده و چند بعدی باشند، این گروه از ربات ها می توانند ابعاد مختلف را کشف کرده و اندازه گیری های متفاوتی را جمع آوری کنند.
اندازه گیری های جمع آوری شده توسط دو تیم متمایز از ربات ها می توانند مدلی از فرایندهای مکانی غیرخطی پیچیده را ایجاد کند. سپس می توان از این مدل برای شناسایی مکان های بهینه سنجش برای ربات های متحرک و پیش بینی چگونگی پیشرفت و تکامل فرآیندهای محیطی در طول زمان به کار برد.
محققان از چارچوب خود برای ایجاد مدلی که ترکیبی از اندازه گیری های جمع آوری شده توسط وسایل نقلیه هوایی و دریایی بود استفاده کردند. آنها سپس پیش بینی های این مدل را با اندازه گیری های یک روبات مقایسه کردند.
محققان در مقاله خود نوشتند: داده های همگن از وسایل نقلیه هوایی پر نویز هستند و با وضوح مکانی بسیار کمتری نسبت به روند واقعی جمع آوری می شوند. هرچه روند پیچیده تر شود ، درج انواع مختلفی از داده ها باعث می شود که رویکرد پیشنهادی از هر یک از برآوردهای دیگر بهتر عمل کند.
به طور کلی در آینده، این چارچوب به دانشمندان اجازه دهد تا نقشه های یکپارچه یا مدل هایی از محیط های مختلف بسازند. به عنوان مثال با استفاده از ربات های هوایی و دریایی به طور مشترک فاکتورهایی مانند دما یا جریان های اقیانوس را نقشه برداری کنند.
منبع: techxplore